哈特倒置器
哈特倒置器(Hart's inversor)属于直线运动机构,是二种在无滑动件的条件下可以进行直线运动的机构[1]。哈特倒置器是由数学家哈利·哈特在1874至1875年发明,也在同一年发表[1][2]。

连杆长度:
曲柄和固定杆: a
曲柄:b(中点固定)
结合杆:c(中点和其他杆件连结)
![{\displaystyle {\begin{aligned}b&<c\\[4pt]2a&<{\tfrac {1}{2}}b+{\tfrac {1}{2}}c\\[2pt]{\tfrac {1}{2}}c&<{\tfrac {1}{2}}b+2a\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/13d497f57a6f1006bd13a5acb4a7773e86490c7c)
哈特第一倒置器
哈特第一倒置器,也称为哈特 W-frame,是以反平行四边形为基础。加上了固定点以及驱动臂后成为六杆连杆。可以用来将转动运动转换为完美的直线运动,其中固定点在短杆上,让另一杆在圆弧上运动[1][3]。
哈特第二倒置器

Link dimensions:[Note 1]
双摇杆:3a + a(固定点之间距离:2b)
结合杆:b
A架的顶点:2a
哈特第二倒置器,也称为哈特 A-frame,在尺寸上的限制比较多[Note 1],不过其运动会沿著过二个固定点之间连线的中垂线。其外部类似大写的A,是用梯形以及亖角形叠合而成。哈特第二倒置器也是六杆连杆。
尺寸举例
以下是动画中连杆的各杆尺寸。
-
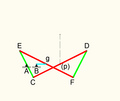
- Hart's first inversor:
- AB = Bg = 2
- CE = FD = 6
- CA = AE = 3
- CD = EF = 12
- Cp = pD = Eg = gF = 6
-
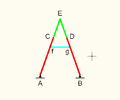
- Hart's second inversor:
- AB = AC = BD = 4
- CE = ED = 2
- Af = Bg = 3
- fC = gD = 1
- fg = 2
.png)

相关条目
注
- ^ 1.0 1.1 The current documented relationship between the links' dimensions is still heavily incomplete. For a generalization, refer to the following GeoGebra Applet: [Open Applet]
参考资料
- ^ 1.0 1.1 1.2 True straight-line linkages having a rectlinear translating bar (PDF). [2016-04-13]. (原始内容存档 (PDF)于2016-01-24).
- ^ International Symposium on History of Machines and Mechanisms.
- ^ Harts inversor (Has draggable animation). [2016-04-13]. (原始内容存档于2016-04-12).
外部链接
- bham.ac.uk – Hart's A-frame (draggable animation) 6-bar linkage